

【强化学习】REINFORCE 算法
目录
一、引言
二、REINFORCE 算法的核心定位与关键特性
三、REINFORCE 算法的数学基础(通俗推导,贴合代码)
1. 核心目标:最大化策略的期望累计回报
2. 关键推导:策略梯度的无偏估计
3. 工程化转化:梯度下降替代梯度上升
四、代码与算法的逐模块对应实现
模块 1:策略网络(PolicyNet)—— 实现策略πθ(a∣s)的参数化
模块 2:REINFORCE 算法核心类 —— 实现策略采样、累计回报计算、策略梯度更新
2.1 __init__:初始化算法核心组件
2.2 take_action:根据策略πθ(a∣s)采样动作(同策略探索)
2.3 update:REINFORCE 算法的核心 —— 实现蒙特卡洛策略梯度更新
模块 3:超参数与环境初始化 —— 工程化适配,保证实验可复现
模块 4:蒙特卡洛训练循环 —— 采集完整轨迹,实现回合式更新
模块 5:结果可视化 —— 分析训练收敛趋势
五、REINFORCE 算法的完整执行流程(结合代码)
六、REINFORCE 算法的Python代码完整实现
七、程序运行结果展示
八、REINFORCE 算法的优缺点(结合代码表现)
优点(代码完美体现)
缺点(代码训练中会体现)
九、经典改进方向(解决高方差 / 低效率问题)
十、总结
一、引言
REINFORCE 算法是策略梯度(Policy Gradient, PG) 家族中最经典、最基础的无模型强化学习算法,由 Williams 在 1992 年提出。核心特点是直接参数化策略、通过蒙特卡洛(MC)方式采集完整回合数据、用梯度上升最大化期望累计回报,区别于 DQN 这类先学习值函数再推导策略的 “间接法”,REINFORCE 是直接优化策略的 “直接法”,非常适合离散动作空间(如 CartPole-v1 的左右两个动作)。
二、REINFORCE 算法的核心定位与关键特性
先明确算法的核心属性,这是理解代码设计的基础,代码的每一处实现都贴合这些特性:
- 无模型(Model-Free):无需学习环境的状态转移模型P(s′∣s,a)和奖励模型R(s,a),仅通过与环境交互采集的轨迹数据更新策略,代码中仅用
env.step()和env.reset()交互,无任何环境模型相关代码。 - 同策略(On-Policy):必须用当前策略采样的轨迹数据来更新策略,采样和更新的策略是同一个,代码中每回合用
agent.take_action()(当前策略)采样动作,采集完轨迹后直接用该轨迹更新策略,无经验回放(经验回放是异策略的典型特征)。 - 蒙特卡洛(MC)式更新:必须采集完整的回合轨迹(从初始状态到终止状态),只有拿到回合的全部奖励,才能计算每一步的累计折扣回报,代码中每个回合结束后才调用
agent.update(),而非步更 / 半回合更,这是蒙特卡洛的核心标志。 - 离散动作空间适配:策略网络输出动作的概率分布,通过类别分布(Categorical)采样动作,代码中用
torch.distributions.Categorical实现,完美适配 CartPole-v1 的二分类动作。 - 梯度上升最大化回报:目标是找到策略参数,让策略的期望累计回报最大;因 PyTorch 仅支持梯度下降,故将 “最大化回报” 转化为 “最小化负的回报损失”,代码中损失函数为
- log_prob * G就是这个逻辑。
三、REINFORCE 算法的数学基础(通俗推导,贴合代码)
REINFORCE 的核心是推导出策略梯度的无偏估计,让代码的更新逻辑有理论支撑。
1. 核心目标:最大化策略的期望累计回报
我们用参数θ表示策略网络(代码中是 PolicyNet 的权重),策略记为 ,表示在状态s下,策略θ选择动作a的概率。
,表示在状态s下,策略θ选择动作a的概率。
算法的核心目标是找到最优参数θ∗,让策略的期望累计折扣回报J(θ)最大:
其中 是从初始状态开始的累计折扣回报,
是从初始状态开始的累计折扣回报, 表示对策略
表示对策略 采样的所有轨迹求期望。
采样的所有轨迹求期望。
2. 关键推导:策略梯度的无偏估计
要最大化J(θ),需要计算J(θ)对参数θ的梯度 (即策略梯度),然后用梯度上升更新θ:
(即策略梯度),然后用梯度上升更新θ:

(α是学习率,代码中由 Adam 优化器自适应调整)
Williams 通过数学推导,得出策略梯度的无偏蒙特卡洛估计(这是 REINFORCE 的核心公式):

- N:训练的回合数(代码中每次 update 对应 1 个回合,N=1);
- :第n个回合的步数;
 :第n回合t步,策略选择动作an,t的对数概率(代码中
:第n回合t步,策略选择动作an,t的对数概率(代码中log_prob);- ,t:第n回合t步开始到回合结束的累计折扣回报(代码中
G),计算式为:

 是折扣因子(代码中
是折扣因子(代码中gamma=0.98),用于衰减远期奖励的权重,让算法更关注近期奖励。
3. 工程化转化:梯度下降替代梯度上升
PyTorch 等深度学习框架仅支持梯度下降(最小化损失函数),因此将策略梯度的最大化目标转化为最小化负的策略梯度损失:

这就是代码中loss = - log_prob * G的理论根源,反向传播该损失的梯度,等价于对原目标做梯度上升。
四、代码与算法的逐模块对应实现
代码分为策略网络(PolicyNet)、REINFORCE 算法核心类、超参数与环境初始化、蒙特卡洛训练循环、结果可视化5 个模块,每个模块都严格对应 REINFORCE 算法的理论要求,下面逐模块讲解。
模块 1:策略网络(PolicyNet)—— 实现策略πθ(a∣s)的参数化
策略网络是 REINFORCE 的 “核心载体”,作用是将状态s映射为动作a的概率分布,代码中是两层全连接网络,适配 CartPole-v1 的简单状态空间(4 维观测)。
class PolicyNet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(PolicyNet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim) # 状态映射到隐藏层
self.fc2 = torch.nn.Linear(hidden_dim, action_dim) # 隐藏层映射到动作空间
def forward(self, x):
x = F.relu(self.fc1(x)) # 非线性激活,拟合复杂状态-动作映射
return F.softmax(self.fc2(x), dim=1) # 转概率分布(和为1)
算法对应点:
- 输入
state_dim(CartPole-v1 为 4):环境的观测维度,对应状态s; - 输出
action_dim(CartPole-v1 为 2):离散动作的数量,输出值经softmax激活后,直接表示πθ(a∣s)(状态s下选每个动作的概率); softmax的必要性:保证输出是合法的概率分布(所有动作的概率和为 1),这是策略πθ(a∣s)的基本要求。
模块 2:REINFORCE 算法核心类 —— 实现策略采样、累计回报计算、策略梯度更新
这是代码的核心,完全实现了 REINFORCE 的三大核心功能:动作采样、累计折扣回报Gt计算、策略梯度更新,分为__init__、take_action、update三个方法。
2.1 __init__:初始化算法核心组件
def __init__(self, state_dim, hidden_dim, action_dim, learning_rate, gamma, device):
self.policy_net = PolicyNet(state_dim, hidden_dim, action_dim).to(device) # 策略网络
self.optimizer = torch.optim.Adam(self.policy_net.parameters(), lr=learning_rate) # 梯度优化器
self.gamma = gamma # 折扣因子γ,用于计算G_t
self.device = device # 训练设备(GPU/CPU)
关键细节:用 Adam 自适应优化器替代原始的随机梯度上升(SGD),提升训练稳定性和收敛速度,这是工程实现的常规优化,不改变算法核心。
2.2 take_action:根据策略πθ(a∣s)采样动作(同策略探索)
def take_action(self, state):
# 状态转张量,消除创建警告,适配设备
state = torch.tensor(np.array([state]), dtype=torch.float).to(self.device)
probs = self.policy_net(state) # 得到动作概率分布π_θ(a|s)
action_dist = torch.distributions.Categorical(probs) # 构建类别分布
action = action_dist.sample() # 从概率分布中随机采样动作
return action.item()
算法对应点:
- 非贪心采样:策略梯度算法需要探索环境,因此不能选概率最大的动作(贪心),而是从概率分布中随机采样(比如动作 1 概率 0.8、动作 2 概率 0.2,大概率选 1 但小概率选 2,保证探索);
- 类别分布(Categorical):专门用于离散动作的概率采样,输入动作概率分布,输出采样的动作索引,完美适配 REINFORCE 的离散动作要求;
- 同策略采样:每次采样用的都是当前策略网络的最新参数,符合 “同策略” 特性。
2.3 update:REINFORCE 算法的核心 —— 实现蒙特卡洛策略梯度更新
这部分代码完全对应策略梯度的数学公式,是算法的 “灵魂”,必须在采集完完整回合轨迹后调用。
def update(self, transition_dict):
# 从轨迹字典中取出当前回合的所有s/a/r
reward_list = transition_dict['rewards']
state_list = transition_dict['states']
action_list = transition_dict['actions']
G = 0 # 初始化累计折扣回报
self.optimizer.zero_grad() # 清空梯度(PyTorch梯度累加,必须手动清空)
# 从最后一步反向遍历,计算每一步的G_t(核心!)
for i in reversed(range(len(reward_list))):
reward = reward_list[i] # 当前步的奖励r_t
# 状态转张量,适配设备
state = torch.tensor(np.array([state_list[i]]), dtype=torch.float).to(self.device)
# 动作转张量并reshape,匹配gather的维度要求
action = torch.tensor([action_list[i]]).view(-1, 1).to(self.device)
# 计算log π_θ(a_t|s_t):取当前动作对应的对数概率
log_prob = torch.log(self.policy_net(state).gather(1, action))
# 反向计算累计折扣回报G_t = r_t + γ * G_{t+1}
G = self.gamma * G + reward
# 计算单步损失:- log_prob * G(梯度下降替代梯度上升)
loss = - log_prob * G
loss.backward() # 单步反向传播,累加梯度(核心!逐步计算,梯度累加)
self.optimizer.step() # 一次更新所有参数(同策略MC的特性)
算法核心细节(逐行对应理论):
- 反向遍历计算Gt:从回合最后一步(t=T−1)往回算,是计算累计折扣回报最高效的方式,公式为
 :
:
- 最后一步(t=T−1):
 (后面无奖励,G=0);
(后面无奖励,G=0); - 倒数第二步(t=T−2):
 ;
; - 以此类推,直到第一步(t=0),完美计算每一步的
 。
。
- 最后一步(t=T−1):
gather(1, action):从策略网络输出的动作概率分布中,取出当前采样动作对应的概率(比如输出 [0.2, 0.8],采样动作 1,就取 0.8),再取对数得到 。
。- 梯度累加(
loss.backward()在循环内):策略梯度的公式是所有步的梯度之和,因此这里逐步计算损失并反向传播,让 PyTorch 自动累加梯度,最后一次更新参数,这是 REINFORCE 蒙特卡洛更新的标准实现。 - 一次更新参数(
optimizer.step()在循环外):遍历完所有步、累加完所有梯度后,才调用优化器更新策略网络的参数,符合 “完整回合后更新” 的蒙特卡洛特性。
模块 3:超参数与环境初始化 —— 工程化适配,保证实验可复现
这部分是强化学习的工程实现基础,无算法理论,但直接影响训练效果和实验可复现性,代码中做了 Gymnasium 的完整适配。
# 超参数设置
learning_rate = 1e-3 # 学习率
num_episodes = 1000 # 总训练回合数
hidden_dim = 128 # 策略网络隐藏层维度
gamma = 0.98 # 折扣因子γ
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu") # 自动选设备
# 环境初始化(Gymnasium适配)
env_name = "CartPole-v1"
# 设置全局随机种子,保证实验可复现
np.random.seed(0)
torch.manual_seed(0)
random.seed(0)
env = gym.make(env_name)
# Gymnasium移除env.seed(),改用动作/观测空间种子
env.action_space.seed(0)
env.observation_space.seed(0)
# 获取环境维度
state_dim = env.observation_space.shape[0] # 状态维度:4
action_dim = env.action_space.n # 动作维度:2
# 实例化REINFORCE智能体
agent = REINFORCE(state_dim, hidden_dim, action_dim, learning_rate, gamma, device)
关键工程细节:
- 随机种子设置:强化学习的训练结果受随机采样(动作、环境)影响,设置种子后,每次训练的结果完全一致,方便调参和验证;
- Gymnasium 适配:Gym 自 2022 年废弃,Gymnasium 是官方无缝替代,代码中处理了
reset/step的返回值变化(后续训练循环会详细讲); - 设备自适应:自动选择 GPU(如果有)加速训练,无 GPU 则用 CPU,不影响算法逻辑。
模块 4:蒙特卡洛训练循环 —— 采集完整轨迹,实现回合式更新
这部分代码实现REINFORCE 的蒙特卡洛核心要求:与环境交互,采集完整的回合轨迹,存储所有s/a/r/s′/done,回合结束后调用agent.update()更新策略,是 “算法理论” 到 “环境交互” 的桥梁。
return_list = [] # 存储每个回合的总回报,用于可视化
for i in range(10):
with tqdm(total=int(num_episodes / 10), desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes / 10)):
episode_return = 0 # 存储当前回合的总回报
# 轨迹字典:存储当前回合的所有s/a/r/s'/done(蒙特卡洛需要完整轨迹)
transition_dict = {'states': [], 'actions': [], 'next_states': [], 'rewards': [], 'dones': []}
state, _ = env.reset(seed=0) # Gymnasium:reset返回(state, info)
done = False
while not done:
action = agent.take_action(state) # 同策略采样动作
# Gymnasium:step返回(next_state, reward, terminated, truncated, info)
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated # 合并终止状态(环境终止+步数截断)
# 存储当前步的轨迹数据
transition_dict['states'].append(state)
transition_dict['actions'].append(action)
transition_dict['next_states'].append(next_state)
transition_dict['rewards'].append(reward)
transition_dict['dones'].append(done)
# 更新状态和当前回合总回报
state = next_state
episode_return += reward
# 回合结束:存储总回报,调用update更新策略(蒙特卡洛核心!)
return_list.append(episode_return)
agent.update(transition_dict)
# 每10回合打印平均回报,监控训练进度
if (i_episode + 1) % 10 == 0:
pbar.set_postfix({'episode': '%d' % (num_episodes / 10 * i + i_episode + 1),
'return': '%.3f' % np.mean(return_list[-10:])})
pbar.update(1)
算法与工程对应点:
- 完整轨迹采集:
while not done循环直到回合终止,保证采集的是从初始状态到终止状态的完整轨迹,符合蒙特卡洛 “完整回合更新” 的要求; - Gymnasium 适配:处理了 Gymnasium 与原 Gym 的返回值差异(核心工程适配,不影响算法):
env.reset(seed=0):返回(state, info),取第一个元素为状态;env.step(action):返回(next_state, reward, terminated, truncated, info),其中terminated是环境自然终止(如 CartPole 倒了),truncated是步数截断(如 CartPole 撑到 500 步),合并为done表示回合结束;
- 回合式更新:只有当
while not done循环结束(回合终止),才调用agent.update(transition_dict),将完整轨迹传入更新策略,这是 REINFORCE 蒙特卡洛特性的核心工程实现; - 回报监控:用
return_list存储每个回合的总回报,每 10 回合计算一次平均回报,用于监控训练收敛趋势(CartPole-v1 的最大回报是 500,平均回报稳定在 500 表示算法收敛)。
模块 5:结果可视化 —— 分析训练收敛趋势
强化学习的训练过程存在大量噪声(因动作是随机采样的),直接绘制原始回报曲线会波动剧烈,因此代码中绘制了原始回报曲线和移动平均(Moving Average)回报曲线,后者用于平滑噪声,清晰展示收敛趋势。
# 绘制原始回报曲线并保存
episode_list = list(range(len(return_list)))
plt.plot(episode_list, return_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('REINFORCE on {}'.format(env_name))
plt.savefig('REINFORCE on CartPole-v1_training.png')
plt.show()
# 绘制移动平均回报曲线并保存(窗口大小9,平滑噪声)
mv_return = rl_utils.moving_average(return_list, 9)
plt.plot(episode_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Moving Average Returns')
plt.title('REINFORCE on {}'.format(env_name))
plt.savefig('REINFORCE on CartPole-v1_moving_average.png')
plt.show()
关键作用:
- 原始回报曲线:展示每回合的真实训练效果,能看到噪声波动;
- 移动平均曲线:用
rl_utils.moving_average计算窗口内的平均回报,平滑噪声,能清晰看到算法是否收敛、收敛速度、收敛稳定性(比如 CartPole-v1 的移动平均曲线会逐渐上升,最终稳定在 500)。
五、REINFORCE 算法的完整执行流程(结合代码)
将上述模块串联,代码的执行流程就是 REINFORCE 算法的标准执行流程,一步一步清晰明了:
- 初始化:创建 CartPole-v1 环境,初始化策略网络和 REINFORCE 智能体,设置超参数和随机种子;
- 循环训练回合:总共有 1000 个训练回合,分 10 次迭代,每次 100 回合;
- 采集完整轨迹:对每个回合,从
env.reset()开始,用当前策略agent.take_action()采样动作,通过env.step()与环境交互,采集每一步的s/a/r/s′/done,直到回合终止,得到完整轨迹; - 蒙特卡洛策略梯度更新:回合终止后,将完整轨迹传入
agent.update(),反向计算每一步的累计折扣回报Gt,计算策略梯度并累加,最后一次更新策略网络的参数; - 监控训练进度:存储每个回合的总回报,每 10 回合打印平均回报,监控收敛趋势;
- 可视化结果:训练结束后,绘制原始回报曲线和移动平均回报曲线,分析算法收敛效果;
- 收敛标志:当 CartPole-v1 的回合平均回报稳定在 500(环境最大步数),表示策略收敛,智能体能稳定让小车保持平衡。
六、REINFORCE 算法的Python代码完整实现
先实现rl_utils库,它包含一些函数,如绘制移动平均曲线、计算优势函数等,不同的算法可以一起使用这些函数。
rl_utils.py中的Python代码如下:
from tqdm import tqdm
import numpy as np
import torch
import collections
import random
class ReplayBuffer:
def __init__(self, capacity):
self.buffer = collections.deque(maxlen=capacity)
def add(self, state, action, reward, next_state, done):
self.buffer.append((state, action, reward, next_state, done))
def sample(self, batch_size):
transitions = random.sample(self.buffer, batch_size)
state, action, reward, next_state, done = zip(*transitions)
return np.array(state), action, reward, np.array(next_state), done
def size(self):
return len(self.buffer)
def moving_average(a, window_size):
cumulative_sum = np.cumsum(np.insert(a, 0, 0))
middle = (cumulative_sum[window_size:] - cumulative_sum[:-window_size]) / window_size
r = np.arange(1, window_size - 1, 2)
begin = np.cumsum(a[:window_size - 1])[::2] / r
end = (np.cumsum(a[:-window_size:-1])[::2] / r)[::-1]
return np.concatenate((begin, middle, end))
def train_on_policy_agent(env, agent, num_episodes):
return_list = []
for i in range(10):
with tqdm(total=int(num_episodes / 10), desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes / 10)):
episode_return = 0
transition_dict = {'states': [], 'actions': [], 'next_states': [], 'rewards': [], 'dones': []}
state, _ = env.reset() # 适配Gymnasium:reset返回(state, info)
done = False
while not done:
action = agent.take_action(state)
# 适配Gymnasium:step返回(next_state, reward, terminated, truncated, info)
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated # 终止=环境终止+步数截断
transition_dict['states'].append(state)
transition_dict['actions'].append(action)
transition_dict['next_states'].append(next_state)
transition_dict['rewards'].append(reward)
transition_dict['dones'].append(done)
state = next_state
episode_return += reward
return_list.append(episode_return)
agent.update(transition_dict)
if (i_episode + 1) % 10 == 0:
pbar.set_postfix({'episode': '%d' % (num_episodes / 10 * i + i_episode + 1),
'return': '%.3f' % np.mean(return_list[-10:])})
pbar.update(1)
return return_list
def train_off_policy_agent(env, agent, num_episodes, replay_buffer, minimal_size, batch_size):
return_list = []
for i in range(10):
with tqdm(total=int(num_episodes / 10), desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes / 10)):
episode_return = 0
state, _ = env.reset() # 适配Gymnasium
done = False
while not done:
action = agent.take_action(state)
# 适配Gymnasium step返回值
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
replay_buffer.add(state, action, reward, next_state, done)
state = next_state
episode_return += reward
if replay_buffer.size() > minimal_size:
b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(batch_size)
transition_dict = {'states': b_s, 'actions': b_a, 'next_states': b_ns, 'rewards': b_r,
'dones': b_d}
agent.update(transition_dict)
return_list.append(episode_return)
if (i_episode + 1) % 10 == 0:
pbar.set_postfix({'episode': '%d' % (num_episodes / 10 * i + i_episode + 1),
'return': '%.3f' % np.mean(return_list[-10:])})
pbar.update(1)
return return_list
def compute_advantage(gamma, lmbda, td_delta):
td_delta = td_delta.detach().numpy()
advantage_list = []
advantage = 0.0
for delta in td_delta[::-1]:
advantage = gamma * lmbda * advantage + delta
advantage_list.append(advantage)
advantage_list.reverse()
return torch.tensor(advantage_list, dtype=torch.float)
REINFORCE 算法的Python代码如下:
import gymnasium as gym
import torch
import torch.nn.functional as F
import numpy as np
import matplotlib.pyplot as plt
import rl_utils
import random # 用于设置全局随机种子
from tqdm import tqdm
# 策略网络
class PolicyNet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(PolicyNet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
return F.softmax(self.fc2(x), dim=1)
# REINFORCE算法
class REINFORCE:
def __init__(self, state_dim, hidden_dim, action_dim, learning_rate, gamma, device):
self.policy_net = PolicyNet(state_dim, hidden_dim, action_dim).to(device)
self.optimizer = torch.optim.Adam(self.policy_net.parameters(), lr=learning_rate)
self.gamma = gamma
self.device = device
def take_action(self, state):
state = torch.tensor(np.array([state]), dtype=torch.float).to(self.device)
probs = self.policy_net(state)
action_dist = torch.distributions.Categorical(probs)
action = action_dist.sample()
return action.item()
def update(self, transition_dict):
reward_list = transition_dict['rewards']
state_list = transition_dict['states']
action_list = transition_dict['actions']
G = 0
self.optimizer.zero_grad()
# 从最后一步反向计算累计回报
for i in reversed(range(len(reward_list))):
reward = reward_list[i]
state = torch.tensor(np.array([state_list[i]]), dtype=torch.float).to(self.device)
action = torch.tensor([action_list[i]]).view(-1, 1).to(self.device)
log_prob = torch.log(self.policy_net(state).gather(1, action))
G = self.gamma * G + reward
loss = - log_prob * G # 损失为负的对数概率乘累计回报(梯度上升等价于损失下降)
loss.backward() # 逐步反向传播计算梯度
self.optimizer.step() # 一次更新所有参数(同策略算法特性)
# 超参数设置
learning_rate = 1e-3
num_episodes = 1000 # 总训练回合数,原代码循环分10次,每次100回合,匹配总次数
hidden_dim = 128
gamma = 0.98
# 自动选择GPU/CPU
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
# 环境初始化
env_name = "CartPole-v1"
# 设置全局随机种子(保证实验可复现)
np.random.seed(0)
torch.manual_seed(0)
random.seed(0)
# 创建环境,设置环境种子
env = gym.make(env_name)
env.action_space.seed(0)
env.observation_space.seed(0)
# 获取环境维度
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
# 实例化REINFORCE智能体
agent = REINFORCE(state_dim, hidden_dim, action_dim, learning_rate, gamma, device)
# 训练循环
return_list = []
for i in range(10):
# 总回合数1000,分10次迭代,每次100回合
with tqdm(total=int(num_episodes / 10), desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes / 10)):
episode_return = 0
transition_dict = {'states': [], 'actions': [], 'next_states': [], 'rewards': [], 'dones': []}
# 适配Gymnasium:reset返回(state, info),取第一个元素
state, _ = env.reset(seed=0) # 重置时指定seed
done = False
while not done:
action = agent.take_action(state)
# 适配Gymnasium:step返回(next_state, reward, terminated, truncated, info)
next_state, reward, terminated, truncated, _ = env.step(action)
# Gymnasium将done拆分为terminated(环境终止)和truncated(步数截断),合并为done
done = terminated or truncated
# 存储转移数据
transition_dict['states'].append(state)
transition_dict['actions'].append(action)
transition_dict['next_states'].append(next_state)
transition_dict['rewards'].append(reward)
transition_dict['dones'].append(done)
# 更新状态和累计回报
state = next_state
episode_return += reward
# 存储当前回合回报
return_list.append(episode_return)
# 更新策略网络
agent.update(transition_dict)
# 每10回合打印一次平均回报
if (i_episode + 1) % 10 == 0:
pbar.set_postfix({'episode': '%d' % (num_episodes / 10 * i + i_episode + 1),
'return': '%.3f' % np.mean(return_list[-10:])})
pbar.update(1)
# 绘制训练曲线
episode_list = list(range(len(return_list)))
plt.plot(episode_list, return_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('REINFORCE on {}'.format(env_name))
plt.savefig('REINFORCE on CartPole-v1_training.png')
plt.show()
# 绘制移动平均曲线,平滑显示训练趋势
mv_return = rl_utils.moving_average(return_list, 9)
plt.plot(episode_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Moving Average Returns')
plt.title('REINFORCE on {}'.format(env_name))
plt.savefig('REINFORCE on CartPole-v1_moving_average.png')
plt.show()
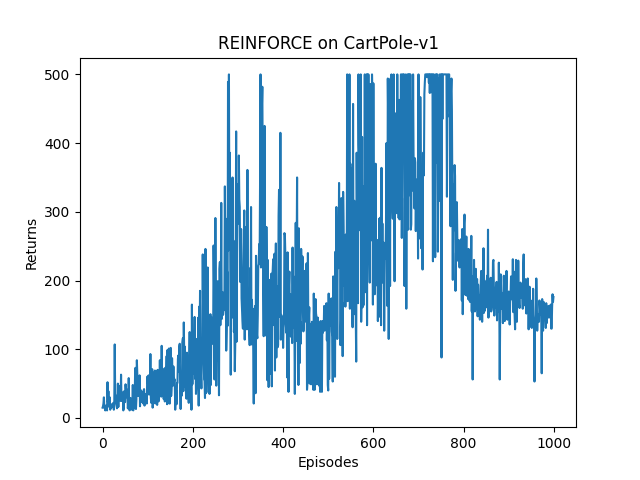
七、程序运行结果展示
Iteration 0: 100%|██████████| 100/100 [00:01<00:00, 77.79it/s, episode=100, return=32.300]
Iteration 1: 100%|██████████| 100/100 [00:02<00:00, 42.19it/s, episode=200, return=65.400]
Iteration 2: 100%|██████████| 100/100 [00:06<00:00, 15.55it/s, episode=300, return=200.400]
Iteration 3: 100%|██████████| 100/100 [00:08<00:00, 11.99it/s, episode=400, return=213.200]
Iteration 4: 100%|██████████| 100/100 [00:06<00:00, 16.56it/s, episode=500, return=130.000]
Iteration 5: 100%|██████████| 100/100 [00:10<00:00, 9.25it/s, episode=600, return=343.400]
Iteration 6: 100%|██████████| 100/100 [00:14<00:00, 6.99it/s, episode=700, return=319.700]
Iteration 7: 100%|██████████| 100/100 [00:17<00:00, 5.80it/s, episode=800, return=224.100]
Iteration 8: 100%|██████████| 100/100 [00:08<00:00, 12.45it/s, episode=900, return=176.100]
Iteration 9: 100%|██████████| 100/100 [00:07<00:00, 14.16it/s, episode=1000, return=158.500]

八、REINFORCE 算法的优缺点(结合代码表现)
优点(代码完美体现)
- 直接优化策略:无需学习值函数,直接参数化并优化策略,策略表达更灵活,既适合离散动作空间(如本代码),也可轻松适配连续动作空间(改策略网络输出和采样分布即可,如用正态分布采样连续动作);
- 实现简单:核心逻辑仅 “采样轨迹 - 计算 G_t - 更新策略” 三步,代码量少,无复杂的值函数拟合、目标网络等模块;
- 无偏估计:蒙特卡洛方式用完整回合的回报计算Gt,是策略梯度的无偏估计,训练收敛后策略的性能更稳定。
缺点(代码训练中会体现)
- 高方差:蒙特卡洛的无偏估计伴随高方差,导致训练回报曲线波动剧烈,收敛速度慢(本代码中训练前期回报波动大,后期才逐渐收敛);
- 同策略效率低:必须用当前策略采样的轨迹更新,采样的轨迹用过一次就丢弃,不能复用(如 DQN 的经验回放),数据利用率极低;
- 只能回合更新:必须等回合结束才能更新,无法进行步更 / 半回合更,对长回合任务(如 Atari 游戏)训练效率极低;
- 无探索 - 利用平衡的显式控制:仅通过动作概率采样实现探索,无专门的探索机制(如 ε- 贪心),探索策略较粗糙。
九、经典改进方向(解决高方差 / 低效率问题)
针对 REINFORCE 的缺点,后续有很多经典改进版,都是工业界常用的策略梯度算法:
- REINFORCE with Baseline:引入值函数作为基线(Baseline),将损失改为−logprob⋅(Gt−V(st)),大幅降低方差,不改变无偏性;
- Actor-Critic(AC):结合策略梯度(Actor)和值函数(Critic),用 TD 误差替代蒙特卡洛的Gt,实现步更 / 半回合更,提升训练效率;
- A2C/A3C:在 AC 基础上做并行训练,进一步提升训练速度;
- PPO(Proximal Policy Optimization):当前最主流的策略梯度算法,在同策略的基础上引入信任域,允许轨迹复用,兼顾效率和稳定性,是工业界的 “首选方案”。
十、总结
本文详细介绍了REINFORCE算法的原理与实现。REINFORCE是一种基于策略梯度的无模型强化学习算法,直接优化策略参数,适用于离散动作空间。文章从算法定位、数学推导、代码实现三个层面展开:首先阐述了其无模型、同策略、蒙特卡洛更新的核心特性;然后推导了策略梯度的数学公式及其工程化实现;最后通过完整的Python代码展示了在CartPole-v1环境中的应用,包括策略网络设计、轨迹采集、蒙特卡洛更新等关键模块。实验结果表明,REINFORCE算法能够有效解决简单控制问题,但存在高方差、低效率等缺点。文章还指出了改进方向,如引入基线函数、Actor-Critic架构等。整体上,REINFORCE作为策略梯度家族的基础算法,具有理论简洁、实现直观的特点。